什么是晶振?
在单片机系统中,晶振(Crystal Oscillator) 是提供精准时钟信号的核心元件,相当于整个系统的“心脏”或“节拍器”。单片机内部所有操作(指令执行、数据传输、定时等)都需要按照精确的时间节奏进行,晶振就是这一节奏的源头。
晶振是什么?
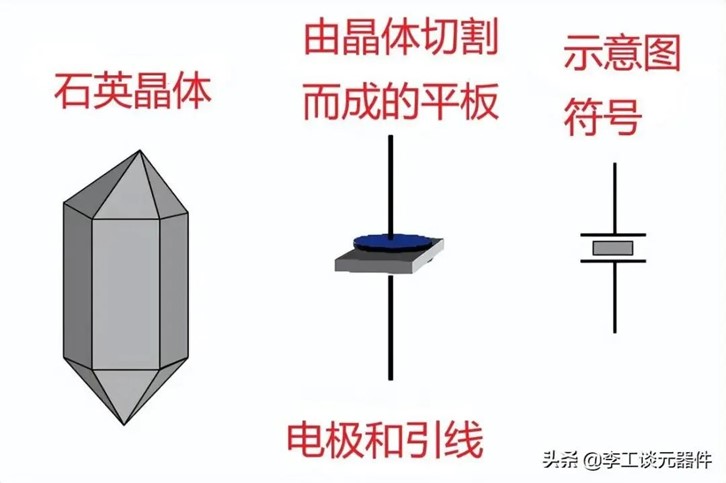
物理形态:通常是一个银色的金属外壳圆柱体或长方形封装(如下左图),内部封装了石英晶体片和电极。

开发板上常见的无源晶振(两边接电容)和有源晶振(四脚封装)
工作原理 – 压电效应:石英晶体具有压电效应:施加电压时晶体会机械形变;机械挤压时又会产生电压。通过电路激励,晶体能以固有频率高频振动(如 8MHz, 12MHz, 16MHz),输出稳定频率的方波信号。
晶振的两种类型
| 类型 | 无源晶振(晶体谐振器) | 有源晶振(晶体振荡器) |
| 组成 | 纯石英晶体 | 晶体 + 振荡电路(内置芯片) |
| 引脚 | 2引脚(需外接负载电容) | 4引脚(VCC, GND, OUT, NC) |
| 工作方式 | 需单片机内部振荡电路配合才能工作 | 独立工作,通电直接输出方波信号 |
| 输出信号 | 正弦波(需整形) | 方波(直接可用) |
| 精度 | ±10~100ppm(受外接电容影响) | ±10~50ppm(精度更高) |
| 成本 | 低 | 较高 |
| 典型应用 | 51单片机、STM32主时钟 | 对精度/稳定性要求高的场合(如通信模块、RTC) |
晶振在单片机中的作用
- 系统主时钟(HSE):为CPU内核、总线、外设提供基准工作频率(如STM32常用8MHz晶振,通过PLL倍频到72MHz)。公式:CPU执行速度 = 晶振频率 × 时钟树配置倍数
- 实时时钟(RTC):为低功耗计时模块提供768KHz时钟(该频率便于分频得到1Hz秒信号:32768=2^15)。
- 通信时序基准:串口波特率、SPI/I2C速度、USB传输等依赖精准的时钟信号同步。
关键参数解析(选型必看!)
- 频率(Frequency):单位为赫兹(Hz)。常用值:4MHz、8MHz、12MHz(51/STM32主频),768KHz(RTC)。
- 精度(Tolerance):
- 单位为ppm(百万分之一)。±20ppm = 误差002%。
- 精度越高通信越稳定(如WiFi模块需±10ppm)。
- 负载电容(Load Capacitance – CL):
- 仅无源晶振需匹配(如12pF, 20pF)。
- 外接电容值必须匹配晶振要求,否则频率偏移甚至停振!
- 工作温度范围:-40℃~85℃(工业级)比0℃~70℃(民用级)更宽。
电路设计避坑指南
- 晶振远离干扰源:避免靠近电源、电机、射频模块,防止电磁干扰导致频率抖动。
- 电容匹配必须准确:使用与晶振规格书要求一致的电容(精度±5%)。
- 走线尽量短:晶振到单片机引脚距离越短越好,减少寄生电容。
- 并联电阻问题:某些单片机需在晶振两端加1MΩ电阻(帮助起振),参考数据手册!
- 示波器测量注意:探头阻抗会影响频率(建议用10X衰减档位)。
51单片机使用的晶振
在51单片机(如经典的STC89C52RC)中选择11.0592MHz或12MHz晶振,核心区别在于波特率计算的精度和定时器时序,直接影响串口通信的稳定性和定时器精度。
关键区别对比表
| 对比项 | 11.0592MHz晶振 | 12MHz晶振 |
| 波特率精度 | ✅ 完美支持标准波特率(误差≈0%) | ❌ 高误差(最高达6.99%,可能导致通信失败) |
| 定时器中断周期 | 计算值可能非整数(需调整) | 计算值为整数(时序更精确) |
| 常见应用场景 | 需串口通信的项目(如连接电脑、WiFi模块) | 无需串口,仅需基础定时/控制的项目 |
| 开发便利性 | 需手动计算波特率参数 | 代码移植更通用(例程常用12MHz) |
核心原理解析
波特率误差问题
51单片机的串口波特率由定时器T1(工作模式2)生成,公式为:波特率 = (晶振频率) / (12 × (256 – TH1) × 波特率分频)
- 0592MHz的优势:可被整除常见波特率(如9600、115200),误差≈0%。计算示例(9600bps):TH1 = 256 – (11059200) / (12 × 32 × 9600) ≈ 253 (0xFD) → 实际波特率误差 = 0%
- 12MHz的缺陷:计算结果通常非整数,需强制取整TH1,导致误差累积。计算示例(9600bps):理论TH1 = 256 – 12000000/(12×32×9600) ≈ 252.745 → 取整TH1=25。实际波特率 = 12000000/(12×32×(256-253)) = 10416bps → 误差达5%!
结果:若使用12MHz晶振,波特率>4800bps时误差可能超3%(RS-232协议要求误差<2%),导致数据乱码。
定时器精度问题
51单片机的定时器由晶振经12分频驱动(每12个时钟周期计数器+1):定时时间 = (65536 – TH0×256 + TL0) × (12 / 晶振频率)
12MHz的优势:每1MHz对应1μs周期,计算简单:
// 例如:12MHz下50ms定时 TH0 = (65536 - 50000)/256; // 50000μs=50ms TL0 = (65536 - 50000)%256; // 计算结果为整数
11.0592MHz的妥协:50ms定时需计算:(12/11.0592)×50000≈54,246 → 非整数,需近似处理(误差约0.12%)。
结论:
- 串口通信 → 必须选0592MHz
- 纯定时控制(如LED闪烁、电机PWM)→ 12MHz更简单精准
实际项目中的选择策略
| 项目类型 | 推荐晶振 | 原因 |
| 串口调试、蓝牙通信 | 11.0592MHz | 确保9600/115200等波特率零误差 |
| 数码管动态扫描 | 12MHz | 需精确的50μs级定时,整数计算更方便 |
| 红外遥控解码 | 12MHz | NEC协议要求560μs精确时序 |
| 多任务切换系统 | 11.0592MHz | 需串口日志监控状态 |
冷知识:为什么是11.0592?
11.0592MHz = 115200 × 96,设计师故意让它可以整除115200、57600、38400等2ⁿ倍波特率,从根源解决通信问题。
什么是波特率?
核心定义:通信的“节奏大师”
想象两个人在打旗语沟通:
- 信息内容:挥舞的旗子代表什么含义(数据位)。
- 沟通节奏:彼此约定好每秒挥舞旗子多少次。这个“每秒挥舞的次数”就是波特率。在串行通信中:波特率 = 每秒传输的符号数 (Symbols per second – baud)。
关键区分:波特率 vs 比特率 (Bit Rate)
- 波特率 (Baud Rate): 每秒传输的符号(Symbol)数量。
- 比特率 (Bit Rate): 每秒传输的二进制位(Bit)数量。
- 两者关系:比特率 (bps) = 波特率 (baud) × 每个符号包含的比特数 (bits per symbol)
- 在单片机最基本的UART串口通信中 (N81格式下):
- 每个符号(Symbol)就是1个比特(Bit)(只有0或1两种状态)。
- 所以此时:波特率 = 比特率。
- 例如:9600 baud = 每秒传输9600个符号 = 每秒传输9600个bit (9600 bps)。
- 在高级调制方式中(如电话Modem、无线电):
- 一个符号(Symbol)可以代表多个比特(Bit)。比如4种相位变化可能代表00, 01, 10, 11 (2 bits/symbol)。
- 此时:比特率 = 波特率 × 2。波特率不变,传输的数据量翻倍。
在嵌入式领域(尤其是51/STM32的UART、I2C、SPI等),我们通常说“波特率”,并且在最简单的异步串口(N81)下,它就是比特率,指每秒传输多少位(bit)。
为什么51单片机特别关注波特率?
51单片机内置了UART (Universal Asynchronous Receiver/Transmitter – 通用异步收发器) 硬件模块,用于通过串口与电脑或其他设备通信。通信双方必须严格遵守相同的波特率,否则接收方会因采样时机错误而读取到乱码。
波特率在UART帧结构中的应用
UART一帧数据通常包含:
- 起始位 (Start Bit): 1个符号时间,固定为低电平 (0)。用于告知接收方“数据来了,准备好采样”。
- 数据位 (Data Bits): 通常8位 (8个符号时间),也可配置为5-9位。代表实际传输的数据 (1个字节)。
- 校验位 (Parity Bit, 可选): 1个符号时间,用于简单的错误检测(奇校验/偶校验)。
- 停止位 (Stop Bit(s)): 通常1或2个符号时间,固定为高电平 (1)。标志一帧数据结束。
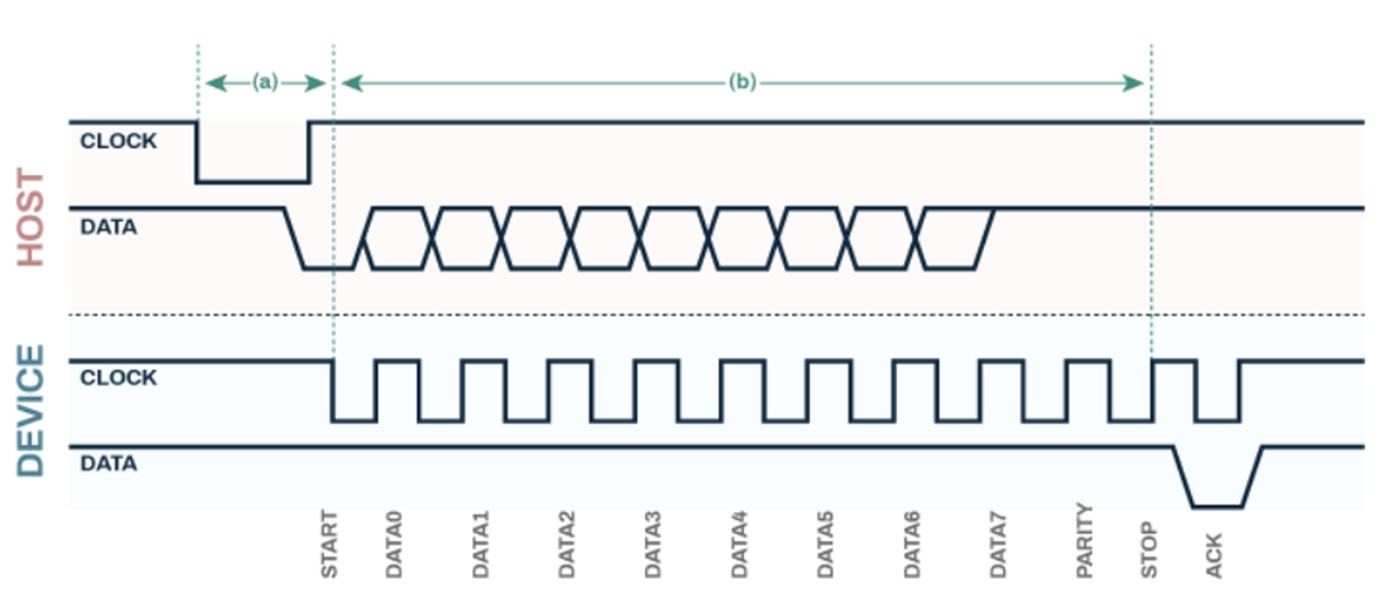
波特率的角色:它决定了每个符号(包含起始位、每个数据位、校验位、停止位)的持续时间(周期)。
- 波特率 = 9600 baud:符号持续时间T = 1 / 波特率 = 1 / 9600 ≈ 104.166 μs (微秒)。
- 起始位的低电平要持续166 μs。
- 第一位数据位的电平持续166 μs后,接收方才会采样判断是0还是1。
- 以此类推,直到所有数据位、校验位和停止位结束。
- 波特率 = 115200 baud:T = 1 / 115200 ≈ 8.68 μs,速度更快,传输一帧数据所需的总时间更短。
51单片机波特率的产生 – 根源在晶振!
51单片机自身没有独立的波特率发生器。其UART所需的波特率是由定时器T1(工作在模式2:8位自动重载)产生的!计算公式如下:
波特率 = (晶振频率) / (12 × (256 – TH1) × 波特率分频系数)
- 晶振频率 (Fosc): 系统的主时钟频率,如12MHz或0592MHz。
- 12: 51单片机经典的12时钟周期=1个机器周期架构。UART使用机器周期计时。
- (256 – TH1): 定时器T1的重装载值(TH1是寄存器里的值)。它决定了定时器计数的溢出周期。
- 波特率分频系数 (SMOD):
- PCON寄存器中的SMOD位可以控制分频。
- 当SMOD=0时,分频系数=16(最常用)。
- 当SMOD=1时,分频系数=32。
- 公式中通常写作32 / (2^{SMOD}): SMOD=0时为32/1=32?注意标准写法是32 / (2^{SMOD})? 更清晰写法是:
- 常用SMOD=0配置: 分频系数 = 16
- 常用SMOD=1配置: 分频系数 = 32
- 大部分例程默认SMOD=0,故公式常简写为:波特率 = Fosc / (12 × 32 × (256 – TH1))
核心痛点:TH1必须是整数!
TH1是一个8位寄存器,只能取0-255的整数值。这导致:
- 理论计算值非整数: 将期望的波特率和晶振频率代入公式反算TH1 = 256 – (Fosc) / (12 × 波特率分频系数 × 期望波特率)。这个(Fosc) / (12 × 波特率分频系数 × 期望波特率)的结果可能不是整数。
- 强制取整: 开发者只能选择最接近的整数赋值给TH1。
- 实际波特率误差: 强制取整后的TH1代入公式算出的实际波特率不等于期望的波特率。
误差容忍度:RS-232标准要求误差小于±2%
通信要稳定,实际波特率相对理论波特率的误差不能太大。UART接收方在每位数据的中间点采样。如果双方波特率有误差,采样点会逐渐偏移。当偏移超过一定范围,就可能采样到错误的值。
| 波特率误差 (%) | 1位偏移所需位数 (理想位) |
| 1% | 100位 |
| 2% | 50位 |
| 3% | 33位 |
| 4% | 25位 |
| 5% | 20位 |
| 10% | 10位 |
严重性: 一个常见的8位数据帧(含起始停止位共10位)如果波特率误差达到10%,接收方在第10位采样时,已经偏移了整整1位的时间,几乎必然出错!对于N81格式的10位一帧,误差最好控制在<3%,尤其要求<2%。
波特率的数值是怎么确认的?
波特率数值(如9600、115200)并非随机设定,而是通信系统中工程实践、技术演进与物理限制共同作用的结果。理解这些数值背后的逻辑,能让你在调试串口时更得心应手。
历史根源:从电报到标准化
波特率(Baud Rate)最早源于电报时代,表示每秒传输的符号数。现代异步串行通信(UART)延续了这一概念:
- 早期电传打印机(TTY):使用机械结构,波特率固定为 75 或 110(如Model 33终端)。
- IBM PC标准化:1980年代,IBM PC将 9600 bps 设定为串口(COM口)的默认速率,因其在当时的硬件条件下能兼顾速度和稳定性。
- 二进制倍数增长:为简化系统设计,后续速率遵循 2的幂次增长(9600 → 19200 → 38400 → 57600 → 115200),使时钟分频系数可硬件复用。
工程选择的核心原则
波特率选择需平衡三大因素:
| 因素 | 说明 | 影响波特率示例 |
| 1. 信号完整性 | 线路越长、干扰越大,波特率必须越低以防数据错乱 | 长距离RS-485常用 9600-19200 |
| 2. 设备处理能力 | MCU需实时处理数据,高波特率对中断响应、内存速度要求更高 | 51单片机慎用>115200,STM32轻松上1M |
| 3. 时钟精度 | 波特率误差需≤2%(RS-232规范),特定晶振(如11.0592MHz)才能精确生成整数 | 12MHz晶振跑115200误差巨大 |
为什么是9600、19200、38400…?
这些数值是二进制倍数关系的典型代表:
9600 × 2 = 19200 19200 × 2 = 38400 38400 × 1.5 ≈ 57600 (非严格2倍,但有历史原因) 57600 × 2 = 115200 115200 × 2 = 230400 115200 × 4 = 460800
好处:
- 硬件分频简单:时钟树只需右移操作(>>1)即可获得下一级频率。
- 兼容传统设备:大量旧设备固化了这些速率(如PLC、工业传感器)。
- 误差控制友好:对晶振频率要求更易满足(如0592MHz可精确生成9600/19200/57600)。
115200 为何成为现代主流?
115200 是PC与嵌入式设备通信的”甜点位”:
- 性能瓶颈突破点:
- 在早期PC(1990年代)上,115200 是软件UART能稳定处理的最高速率(CPU中断响应极限)。
- 超过此速率需硬件串口(如16550 UART芯片)。
- USB转串口的适配:现代USB-CDC虚拟串口默认兼容115200,FTDI/CP2102等芯片直接支持该速率。
- 实用性与速度平衡:
- 传输1字节(10位:1起始+8数据+1停止)耗时约 87μs。
- 比57600(174μs/字节)快一倍,比230400(43μs)更抗干扰。
速度对比表(1字节=10位):
| 波特率 | 传输1字节耗时 | 适用场景 |
| 9600 | 1.04 ms | 长距离RS-485, 低速传感器 |
| 57600 | 174 μs | 老式蓝牙模块(SPP), 中速通信 |
| 115200 | 87 μs | 调试终端、STM32烧录、主流通信 |
| 230400 | 43 μs | 高速SD卡日志传输、高带宽设备 |
| 460800 | 22 μs | FPGA高速数据流、专用设备 |
特殊数值的隐藏逻辑
- 57600 的由来:
- 早期是 38400×1.5 的产物(因为38400×2=76800超出当时硬件能力)。
- 在 0592MHz + SMOD=1 时可精确生成(N=2),成为可靠的高波特率选择。
- 19200 的工业地位:PLC、Modbus RTU设备的经典速率,因其抗干扰能力优于38400/57600。
- 300-2400 的遗产:电话线Modem时代遗留(如传真机),现已罕见。
现代如何突破传统限制?
随着技术发展,非标波特率(如 921600、1M)逐渐普及:
- 高精度时钟:STM32的72MHz主频 + 小数波特率寄存器可生成任意速率(误差<0.1%)。
- 高速接口支持:
- USB-CDC虚拟串口可达 3Mbps(CP2104)。
- 硬件串口+FIFO缓冲:STM32 UART支持 5Mbps(需外部PHY芯片)。
- 协议优化:使用 1停止位、无校验位(如115200→8N1)可提升有效数据占比。
总结:波特率选择的黄金法则
| 场景 | 推荐波特率 | 选择原因 |
| 长距离有线通信 | 9600, 19200 | 抗干扰优先,确保信号完整 |
| STM32/Arduino调试 | 115200 | 速度与稳定性最佳平衡,工具链默认支持 |
| 传感器低速数据采集 | 9600, 38400 | 满足带宽即可,降低功耗和误码 |
| 高速日志传输 | 230400, 460800 | 需配合硬件FIFO/DMA,避免阻塞CPU |
| USB-CDC虚拟串口 | 最高支持3M | 受限于USB Full-Speed(12Mbps)的协议开销 |
为什么11.0592MHz是串口“黄金频率”?
11.0592 MHz 被称为串口“黄金频率”,主要是因为它可以完美整除常用的串口波特率(baud rate),从而避免通信误差。下面是详细原因:
串口通信基础
串口通信中,波特率(如 9600、19200、38400、57600、115200 等)指的是每秒传输的比特数。为了确保通信双方能准确解码数据,波特率必须非常精确。
在很多微控制器(MCU)或 UART 模块中,波特率是通过主时钟(晶振频率)经过分频器计算得到的:波特率 = 时钟频率 / (某个固定的分频系数)
为什么是 11.0592 MHz?
11.0592 MHz = 11059200 Hz它是许多常用波特率的整数倍,比如:
| 波特率 | 除数 = 11059200 ÷ 波特率 |
| 9600 | 1152 |
| 19200 | 576 |
| 38400 | 288 |
| 57600 | 192 |
| 115200 | 96 |
这些除数都是整数,意味着生成波特率时无误差,通信极为可靠。
如果用别的晶振(如 12 MHz)会怎样?
以 12 MHz 为例,12,000,000 ÷ 9600 = 1250虽然也是整数,但对于 115200 波特率:
- 12,000,000 ÷ 115200 ≈ 104.17(不是整数)
- 这样会产生误差,可能导致接收错误,尤其在高速通信时更明显。